This is the third blog post of Object Detection with YOLO blog series. This blog discusses the YOLO's model architecture. I will use PASCAL VOC2012 data. This blog assumes that the readers have read the previous two blog posts - Part 1, Part 2.
Andrew Ng's YOLO lecture¶
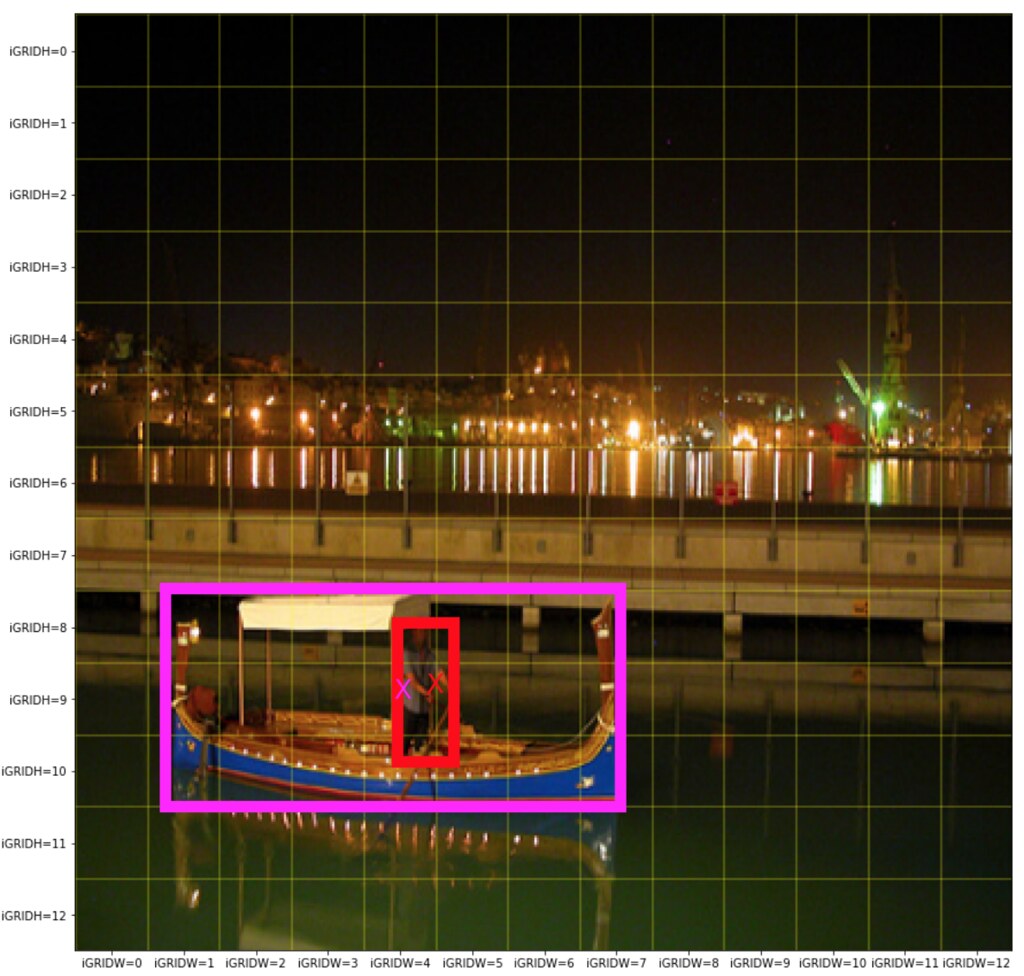
Part 2 Object Detection using YOLOv2 on Pascal VOC2012 - input and output encoding
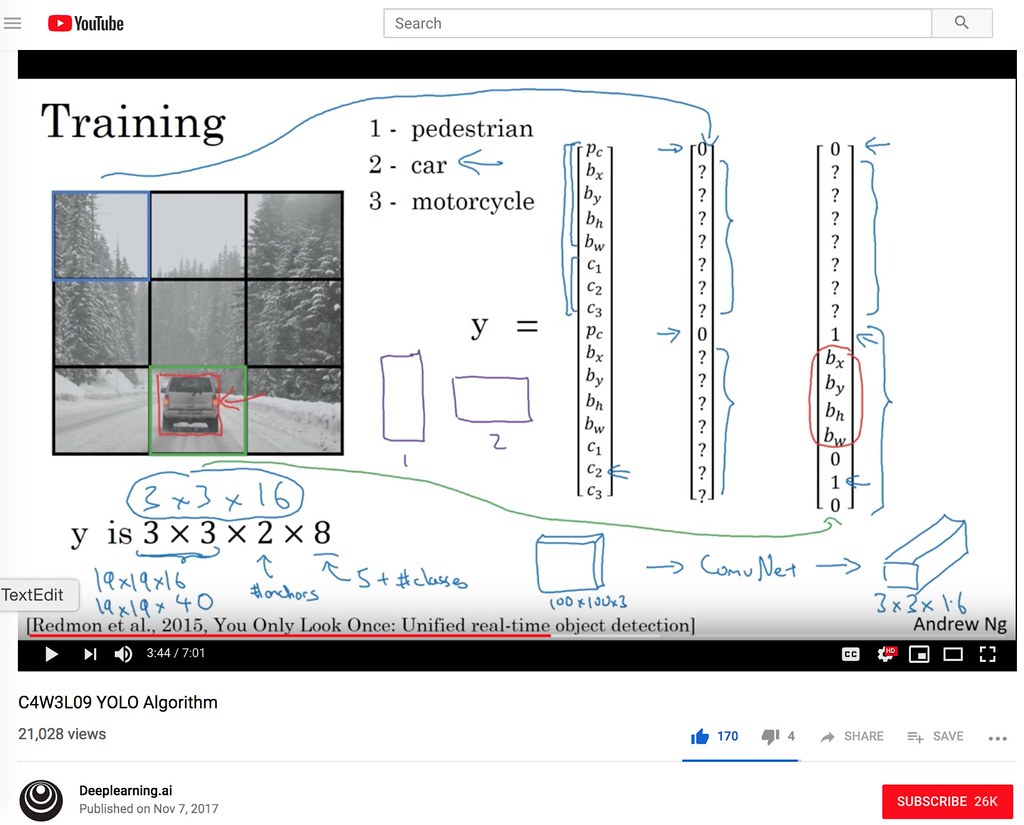 The screenshot of Andrew Ng's YOLO lecture
The screenshot of Andrew Ng's YOLO lecture
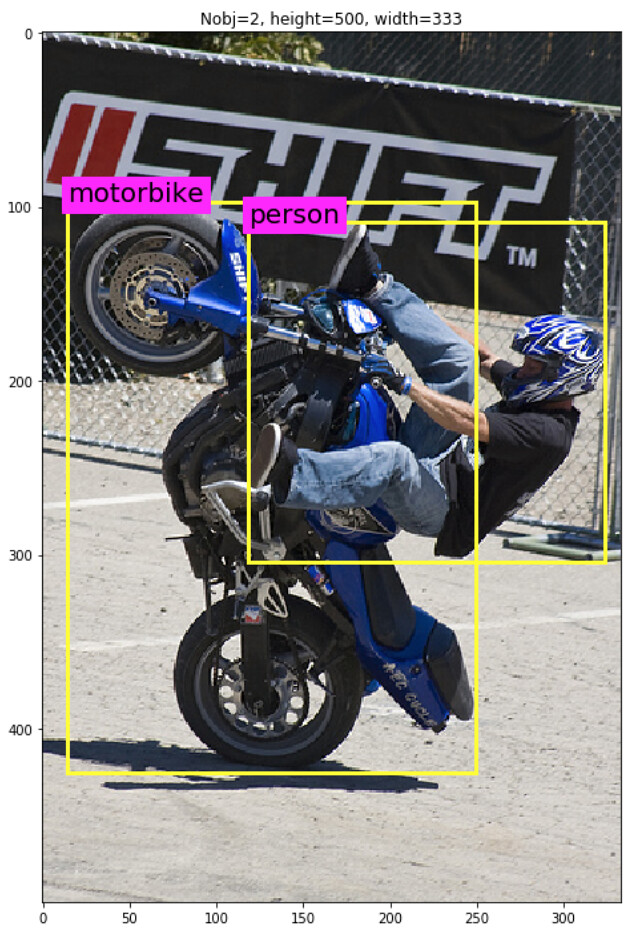
This is the second blog post of Object Detection with YOLO blog series. This blog discusses the YOLO's input and output encoding. I will use PASCAL VOC2012 data.
This blog assumes that the readers have watched Andrew Ng's YOLO lectures on youtube. Specifically, the following 5 videos. Each of these videos are (of course free and) about 10 minutes and in total it takes less than 45 minitues. So please watch through all the videos.
Part 1 Object Detection using YOLOv2 on Pascal VOC2012 - anchor box clustering
This is the first blog post of Object Detection with YOLO blog series. The goal of this blog series is to understand the state-of-art object detection algorithm, called YOLO (you only look once). Allegedly, Andrew Ng mentioned that YOLO is the best object detection algorithm in his course. See the youtube video below:
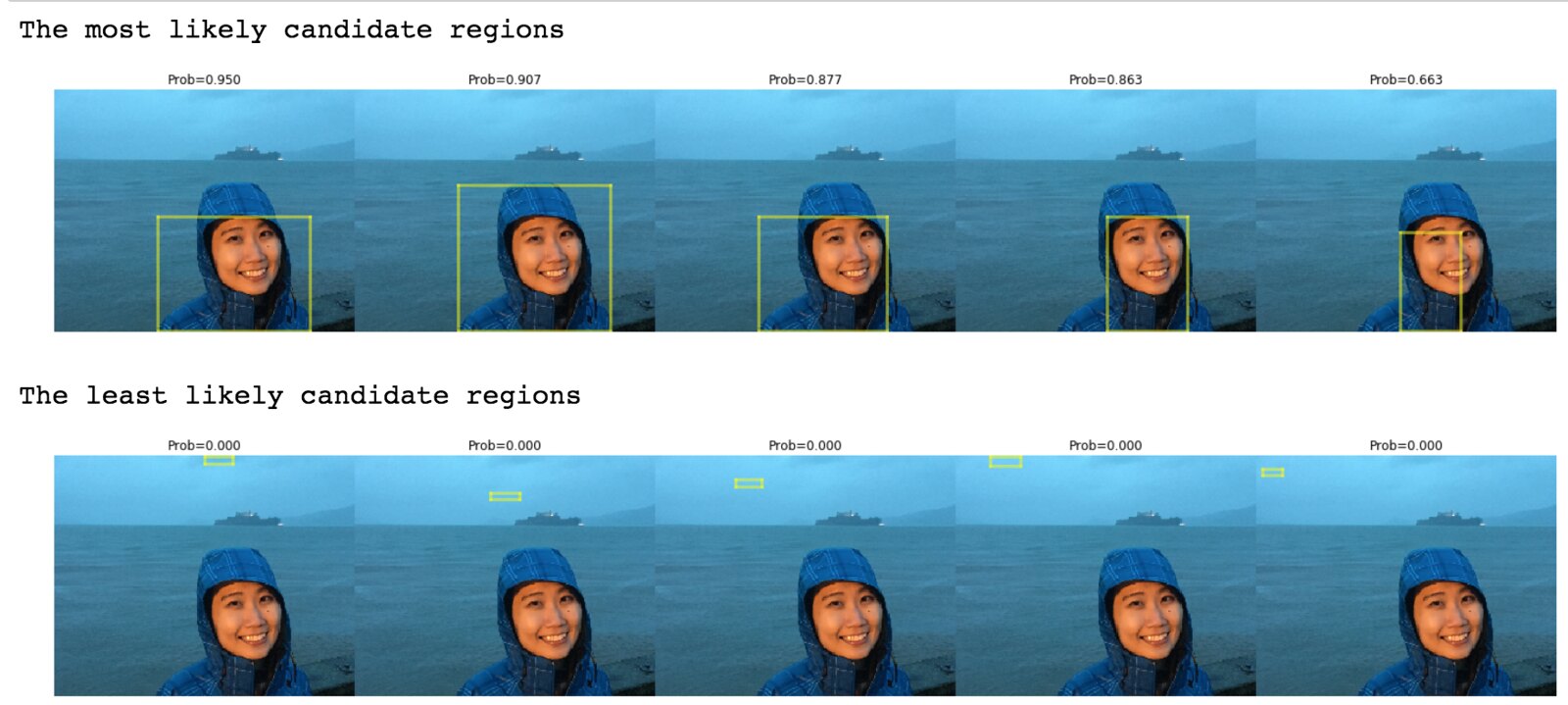
Part 5 Object Detection using RCNN on Pascal VOC2012 - inference
This is the last article of the blog series for Object Detection with R-CNN.
If you are reading this blog, congratulations for getting this far. Now you are ready to experiment the performance of your RCNN classifier. I will use my own image to see whether the classifier can detect my face.
Part 4 Object Detection with Pascal VOC2012 - CNN feature extraction
This is part of the blog series for Object Detection with R-CNN.
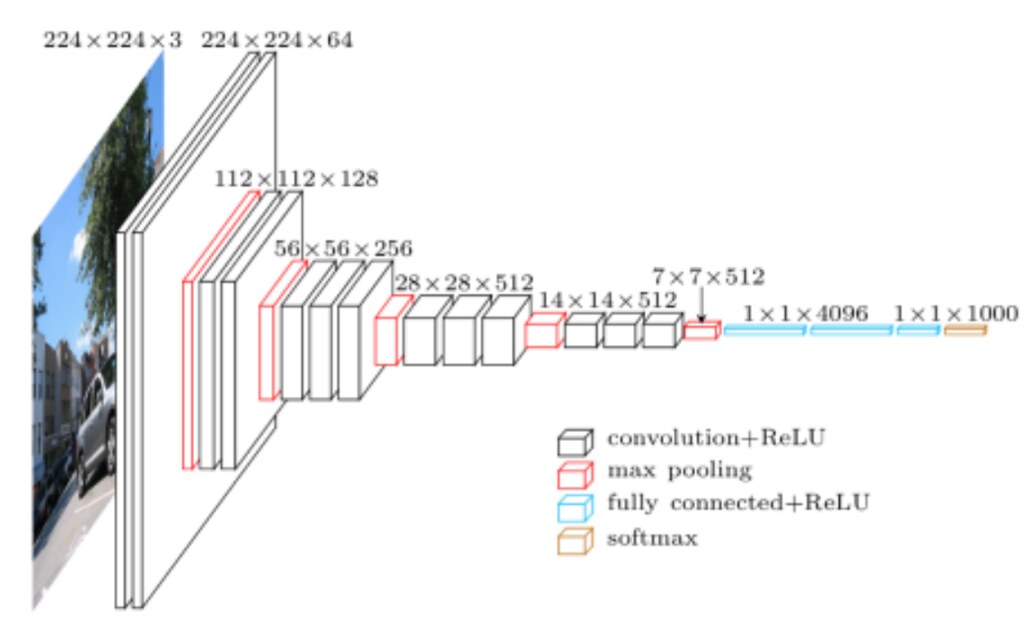 Cited from VGG in TensorFlow.
Cited from VGG in TensorFlow.
In this blog, we are now ready to train our classifier for object detection. We will use a large pre-trained CNN to extract a fixed-length feature vector from each region, and then create artificial neural networks that mapps the feature vector to the object class. We will focus on detecting a person.
Part 3 Object Detection using RCNN on Pascal VOC2012 - Selective Search
This is part of the blog series for Object Detection with R-CNN.
In this blog, we will review the selective sarch algorithm. The selective search is one of the most successful category-independent region proposal algorithms, and R-CNN also uses selective search to find region proposal.
J.R.R. Uijlings et al take a hierarchical grouping algorithm to form the basis of selective search, and first apply fast segmentation method of Felzenszwalb and Huttenlocher
Part 2 Object Detection using RCNN on Pascal VOC2012 - R-CNN overview
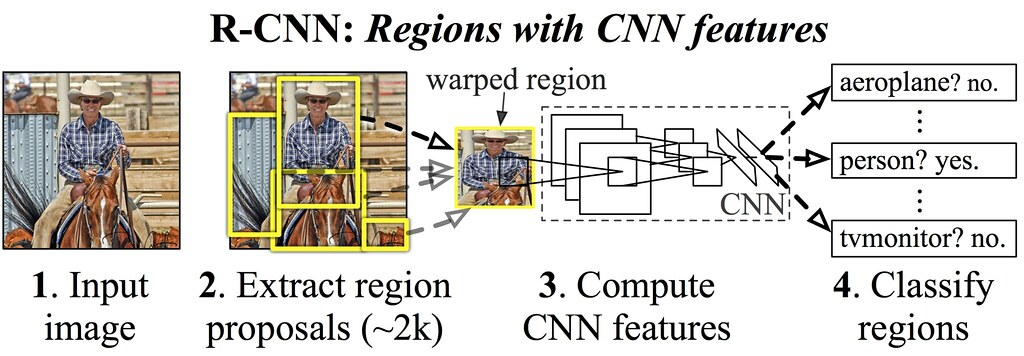 Cited from Rich feature hierarchies for accurate object detection and semantic segmentation paper
Cited from Rich feature hierarchies for accurate object detection and semantic segmentation paper
This is the second blog post of "Object Detection with R-CNN" series.
In this blog, I will review Rich feature hierarchies for accurate object detection and semantic segmentation paper to understand Regions with CNN features (R-CNN) method. R-CNN is a successful object detection algorithm that can return class label of objects and their bounding boxes for a given image. The work is published in 2013 and there have been many faster algorithms for the object detection algorithm (e.g., fast R-CNN, faster R-CNN and Yolo). But nevertheless, the implementation of the R-CNN is simple, and serves as a powerful bench mark for various object detection tasks. So for that reason, this blog will review the R-CNN algorithm.
Part 1 Object Detection using RCNN on Pascal VOC2012 - Data Preparation and Understanding
This is the first blog post of "Object Detection with R-CNN" series.
Object detection¶
According to the wikipedia:
Object detection is a computer technology related to computer vision and image processing that deals with detecting instances of semantic objects of a certain class (such as humans, buildings, or cars) in digital images and videos.
Implement Local Binary Pattern Descriptor from scratch
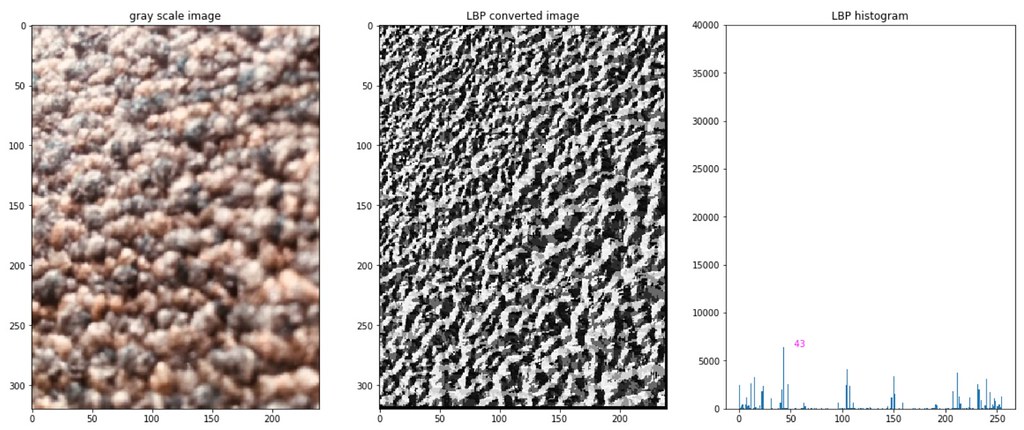
My goal of this blog post is to understand Local Binary Pattern (LBP) texture operator. It is a simple yet very powerful algorithm to understand image. With the features created by the LBP texture operator, we can tell the texture of the objects in image; The features can, for example, separate images of carpet from image of blicks. That sounds very cool and I want to understand LBP texutre operator better.
Low and High pass filtering on images using FFT
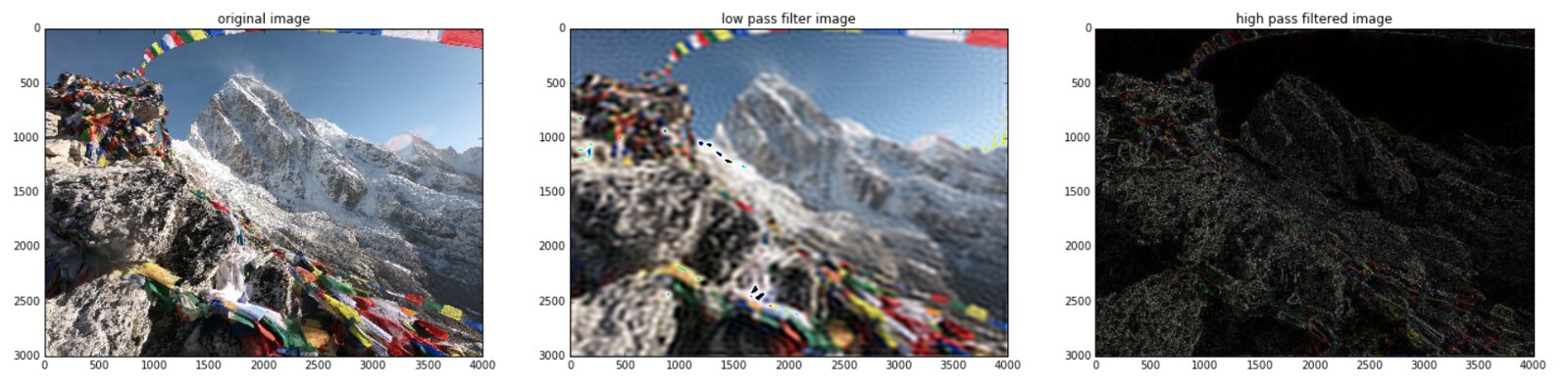
In this blog post, I will use np.fft.fft2 to experiment low pass filters and high pass filters.
**Low Pass Filtering** A low pass filter is the basis for most smoothing methods. An image is smoothed by decreasing the disparity between pixel values by averaging nearby pixels (see Smoothing an Image for more information).