experiencor/keras-yolo2's YOLO V2 loss¶
This is the fourth blog post of Object Detection with YOLO blog series. This blog discusses the YOLO's loss funciton. This will be the most intense blog post in Object Detection with YOLO blog series. as loss function of YOLO is quite complex. So please get excited! For demonstration of the code, I will agian use PASCAL VOC2012 data. This blog assumes that the readers have read the previous blog posts - Part 1, Part 2 and Part 3.
Andrew Ng's YOLO lecture¶
- Neural Networks - Bounding Box Predictions
- C4W3L06 Intersection Over Union
- C4W3L07 Nonmax Suppression
- C4W3L08 Anchor Boxes
- C4W3L09 YOLO Algorithm
Reference¶
Reference in my blog¶
- Part 1 Object Detection using YOLOv2 on Pascal VOC2012 - anchor box clustering
- Part 2 Object Detection using YOLOv2 on Pascal VOC2012 - input and output encoding
- Part 3 Object Detection using YOLOv2 on Pascal VOC2012 - model
- Part 4 Object Detection using YOLOv2 on Pascal VOC2012 - loss
- Part 5 Object Detection using YOLOv2 on Pascal VOC2012 - training
- Part 6 Object Detection using YOLOv2 on Pascal VOC 2012 data - inference on image
- Part 7 Object Detection using YOLOv2 on Pascal VOC 2012 data - inference on video
My GitHub repository¶
This repository contains all the ipython notebooks in this blog series and the funcitons (See backend.py).
import matplotlib.pyplot as plt
import numpy as np
import os, sys
import tensorflow as tf
print(sys.version)
%matplotlib inline
Define anchor box¶
ANCHORS defines the number of anchor boxes and the shape of each anchor box.
The choice of the anchor box specialization is already discussed in Part 1 Object Detection using YOLOv2 on Pascal VOC2012 - anchor box clustering.
Based on the K-means analysis in the previous blog post, I will select 4 anchor boxes of following width and height. The width and heights are rescaled in the grid cell scale (Assuming that the number of grid size is 13 by 13.) See Part 2 Object Detection using YOLOv2 on Pascal VOC2012 - input and output encoding to learn how I rescal the anchor box shapes into the grid cell scale.
Here I choose 4 anchor boxes. With 13 by 13 grids, every frame gets 4 x 13 x 13 = 676 bouding box predictions.
ANCHORS = np.array([1.07709888, 1.78171903, # anchor box 1, width , height
2.71054693, 5.12469308, # anchor box 2, width, height
10.47181473, 10.09646365, # anchor box 3, width, height
5.48531347, 8.11011331]) # anchor box 4, width, height
Define Label vector containing 20 object classe names.¶
LABELS = ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle',
'bus', 'car', 'cat', 'chair', 'cow',
'diningtable','dog', 'horse', 'motorbike', 'person',
'pottedplant','sheep', 'sofa', 'train', 'tvmonitor']
YOLOv2's loss function¶
Before discussing the loss function, I will read in VOC2012 data, and call the batch generator in order to use the example batch [x_batch,b_batch],y_batch to demonstrate the usage of the loss funciton.
Read images and annotations into memory¶
Use the pre-processing code for parsing annotation at experiencor/keras-yolo2.
This parse_annoation function is already used in Part 1 Object Detection using YOLOv2 on Pascal VOC2012 - anchor box clustering and saved in my python script.
This script can be downloaded at my Github repository, FairyOnIce/ObjectDetectionYolo/backend.
### The location where the VOC2012 data is saved.
train_image_folder = "../ObjectDetectionRCNN/VOCdevkit/VOC2012/JPEGImages/"
train_annot_folder = "../ObjectDetectionRCNN/VOCdevkit/VOC2012/Annotations/"
np.random.seed(1)
from backend import parse_annotation
train_image, seen_train_labels = parse_annotation(train_annot_folder,
train_image_folder,
labels=LABELS)
print("N train = {}".format(len(train_image)))
Instantiate batch generator object¶
SimpleBatchGenerator is discussed and used in
Part 2 Object Detection using YOLOv2 on Pascal VOC2012 - input and output encoding.
This script can be downloaded at my Github repository, FairyOnIce/ObjectDetectionYolo/backend.
from backend import SimpleBatchGenerator
BATCH_SIZE = 500
IMAGE_H, IMAGE_W = 416, 416
GRID_H, GRID_W = 13 , 13
TRUE_BOX_BUFFER = 50
BOX = int(len(ANCHORS)/2)
# CLASS = len(LABELS)
generator_config = {
'IMAGE_H' : IMAGE_H,
'IMAGE_W' : IMAGE_W,
'GRID_H' : GRID_H,
'GRID_W' : GRID_W,
'LABELS' : LABELS,
'ANCHORS' : ANCHORS,
'BATCH_SIZE' : BATCH_SIZE,
'TRUE_BOX_BUFFER' : TRUE_BOX_BUFFER,
}
def normalize(image):
return image / 255.
train_batch_generator = SimpleBatchGenerator(train_image, generator_config,
norm=normalize, shuffle=True)
[x_batch,b_batch],y_batch = train_batch_generator.__getitem__(idx=3)
Calculating YOLOv2's loss function¶
I have seen a lot of online blog posts about YOLO v1 loss function. For example, at Understanding YOLO. However, most of these posts discusses the loss function of Yolo v1 which must be different from Yolo v2. The two losses are different and the lack of explicit formula in the Yolo v2 loss paper rises some confusion, for example at What is YOLOv2 Loss Function - Google Groups.
The YOLO v1 is difined in You Only Look Once:Unified, Real-Time Object Detection as:
YOLO V1 loss¶
$$\begin{array}{rl} &\lambda_\textbf{coord} \sum_{i = 0}^{S^2} \sum_{j = 0}^{B} L_{ij}^{\text{obj}} \left[ \left( x_i - \hat{x}_i \right)^2 + \left( y_i - \hat{y}_i \right)^2 \right] \\ &+ \lambda_\textbf{coord} \sum_{i = 0}^{S^2} \sum_{j = 0}^{B} L_{ij}^{\text{obj}} \left[ \left( \sqrt{w_i} - \sqrt{\hat{w}_i} \right)^2 + \left( \sqrt{h_i} - \sqrt{\hat{h}_i} \right)^2 \right] \\ &+ \sum_{i = 0}^{S^2} \sum_{j = 0}^{B} L_{ij}^{\text{obj}} \left( C_i - \hat{C}_i \right)^2 \\ &+ \lambda_\textrm{noobj} \sum_{i = 0}^{S^2} \sum_{j = 0}^{B} L_{ij}^{\text{noobj}} \left( C_i - \hat{C}_i \right)^2 \\ &+ \sum_{i = 0}^{S^2} L_i^{\text{obj}} \sum_{c \in \textrm{classes}} \left( p_i(c) - \hat{p}_i(c) \right)^2 \end{array}$$
YOLOv2 paper expalins the difference in architecture from YOLOv1 as follows:
We remove the fully connected layers from YOLO(v1) and use anchor boxes to predict bounding boxes... When we move to anchor boxes we also decouple the class prediction mechanism from the spatial location and instead predict class and objectness for every anchorbox.
This means that the confidence probability $p_i(c)$ above should depend not only on $i$ and $c$ but also an anchor box index, say $j$. Therefore, the loss needs to be different from above. Unfortunately, YOLOv2 paper does not explicitly state its loss function. So rather than making a guess based on the paper, I will try to understand the loss function that experiencor/keras-yolo2 defines for his YOLOv2.
experiencor/keras-yolo2's YOLO V2 loss¶
In Part 2 Object Detection using YOLOv2 on Pascal VOC2012 - input and output encoding, I showed that YOLO's output is encoded into y_batch.
Here I revisit YOLO's ground truth output encoding with mathematical notations.
y_batch
The numpy array of shape (BATCH_SIZE, GRID_H, GRID_W, BOX, 4 + 1 + N classes) .
BOX = The number of anchor boxes.
In the following notation, the grid cell index can be defined by two index (igrid_h,igrid_w) or by a single index $i$; (igrid_h,igrid_w) $\leftrightarrow i$
y_batch[iframe,igrid_h,igrid_w,j,:4]contains(center_x,center_y,center_w,center_h)ofjth anchor atgrid cell=(igrid_h,igrid_w)= $i$, if the object exists in this (grid cell, anchor) pair, else they simply contain 0.y_batch[iframe,igrid_h,igrid_w,j,:4]$= (x_{i,\texttt{j}},y_{i,\texttt{j}},w_{i,\texttt{j}},h_{i,\texttt{j}})$
y_batch[iframe,igrid_h,igrid_w,j,4]contains 1 if the object exists in this (grid cell, anchor) pair, else it contains 0.y_batch[iframe,igrid_h,igrid_w,j,4]= $ C_{i,\texttt{j}}$
y_batch[iframe,igrid_h,igrid_w,j,5 + iclass]contains 1 if theiclassth class object exists in this (grid cell, anchor) pair, else it contains 0.y_batch[iframe,igrid_h,igrid_w,j,5:]$ = (p^1_{i,\texttt{j}},p^2_{i,\texttt{j}},p^3_{i,\texttt{j}},\cdots,p^{\textrm{Nclass}}_{i,\texttt{j}})$
The loss function of YOLO treats each set of elements
(center_x,center_y,center_w,center_h),
C, and
(p_1,p_2,...p_Nclass) in y_batch[iframe,igrid_h,igrid_w,:] differently. So let's understand each term of the loss one by one.
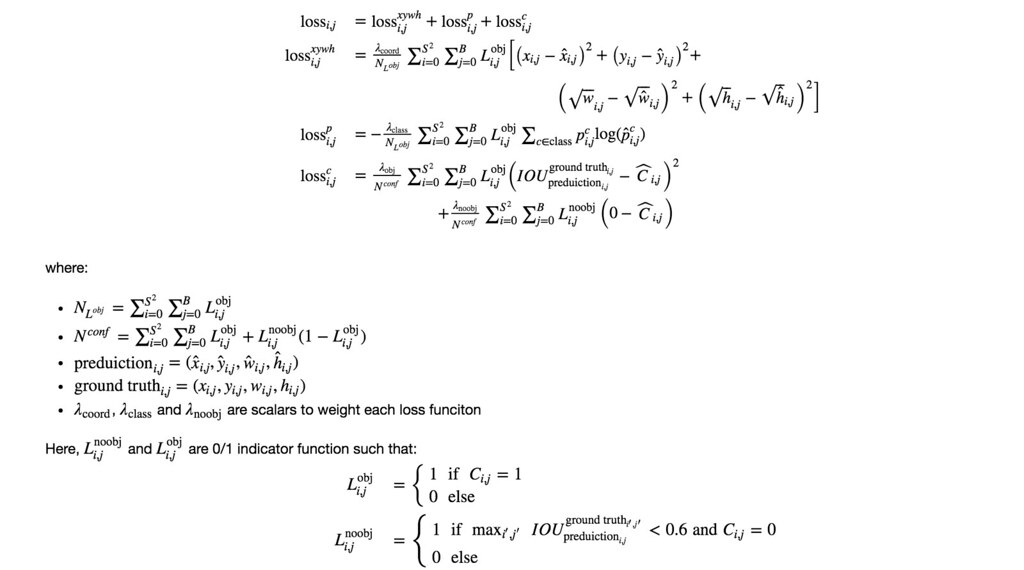
Then the loss corresponding to (grid cell, anchor box) pair = ($i,j$) is calculated as:
$$\small %%% \begin{array}{rl}\small \textrm{loss}_{i,j} &= \textrm{loss}_{i,j}^{xywh} + \textrm{loss}_{i,j}^p + \textrm{loss}_{i,j}^c \\ %%% \textrm{loss}_{i,j}^{xywh}&= \frac{\lambda_{\textrm{coord}}}{N_{L^{obj}}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \big[ \left(x_{i,j}-\hat{x}_{i,j}\right)^2 + \left(y_{i,j}-\hat{y}_{i,j}\right)^2 +\\ &\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\left(\sqrt{w}_{i,j}-\sqrt{\hat{w}}_{i,j}\right)^2 + \left(\sqrt{h}_{i,j}-\sqrt{\hat{h}}_{i,j}\right)^2 \big]\\ %%% \textrm{loss}_{i,j}^p&= -\frac{\lambda_{\text{class}}}{N_{L^{obj}}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \sum_{c \in \text{class}} p_{i,j}^c \text{log}(\hat{p}_{i,j}^c)\\ %%% \textrm{loss}_{i,j}^c &= \frac{\lambda_{\text{obj}}}{N^{conf}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \left( IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i,j}} - \widehat{C}_{i,j} \right)^2\\ &\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;+ \frac{\lambda_{\textrm{noobj}}}{N^{conf}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{noobj}} \left(0 - \widehat{C}_{i,j}\right)\\ \end{array} $$
where:
- $N_{L^{obj}} = \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}}$
$N^{conf} = \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} + L_{i,j}^{\text{noobj}}(1-L_{i,j}^{\text{obj}})$
$\text{preduiction}_{i,j}=(\hat{x}_{i,j},\hat{y}_{i,j},\hat{w}_{i,j},\hat{h}_{i,j})$
- $\text{ground truth}_{i,j}=(x_{i,j},y_{i,j},w_{i,j},h_{i,j})$
- $\lambda_{\text{coord}}$, $\lambda_{\text{class}}$ and $\lambda_{\text{noobj}}$ are scalars to weight each loss funciton
Here, $L_{i,j}^{\text{noobj}}$ and $L_{i,j}^{\text{obj}}$ are 0/1 indicator function such that: $$ \begin{array}{rl} L_{i,j}^{\text{obj}} &= \begin{cases} 1 \;\;\text{if} \;\;C_{i,j}=1\\ 0\;\;\text{else}\\ \end{cases}\\ L_{i,j}^{\text{noobj}} & = \begin{cases} 1 \;\;\text{if}\;\;\text{max}_{i',j'} \;\;IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i',j'}} < 0.6 \;\text{and}\; C_{i,j} = 0\\ 0\;\;\text{else}\\ \end{cases}\\ \end{array} $$
As the loss function seems complex, let's go over the experiencor/keras-yolo2's YOLO V2 loss function line by line.
Global hyperparameters necessary for the loss function¶
- true_boxes
- GRID_W
- GRID_H
- BATCH_SIZE
- ANCHORS
- LAMBDA_COORD
- LAMBDA_CLASS
- LAMBDA_NO_OBJECT
- LAMBDA_OBJECTLAMBDA_NO_OBJECT = 1.0
LAMBDA_OBJECT = 5.0
LAMBDA_COORD = 1.0
LAMBDA_CLASS = 1.0
Step 1: Adjust prediction output¶
experiencor/keras-yolo2's YOLO V2 loss function starts off by rescaling the prediction output. Notice that the predicted y_batch output can take any real values as the conv_23 layer has a linear activation function. However, the prediction outputs should be rescaled in the following range:
- $\hat{x}_{i,j}$ ranges between [
igrid_w,igrid_w+1). - $\hat{y}_{i,j}$ ranges between [
igrid_h,igrid_h+1) - $\hat{w}_{i,j}$ ranges between 0, GRID_W
- $\hat{h}_{i,j}$ ranges between 0, GRID_H
- $\widehat{C}_{i,j}$ ranges between 0 and 1.
- $\widehat{p^c}_{i,j}$ ranges between 0 and 1
The 1, 2, 3 and 4 are because the bounding boxes are in grid cell scale. See Bounding box encoding Section in Part 2 Object Detection using YOLOv2 on Pascal VOC2012 - input and output encoding
def get_cell_grid(GRID_W,GRID_H,BATCH_SIZE,BOX):
'''
Helper function to assure that the bounding box x and y are in the grid cell scale
== output ==
for any i=0,1..,batch size - 1
output[i,5,3,:,:] = array([[3., 5.],
[3., 5.],
[3., 5.]], dtype=float32)
'''
## cell_x.shape = (1, 13, 13, 1, 1)
## cell_x[:,i,j,:] = [[[j]]]
cell_x = tf.to_float(tf.reshape(tf.tile(tf.range(GRID_W), [GRID_H]), (1, GRID_H, GRID_W, 1, 1)))
## cell_y.shape = (1, 13, 13, 1, 1)
## cell_y[:,i,j,:] = [[[i]]]
cell_y = tf.transpose(cell_x, (0,2,1,3,4))
## cell_gird.shape = (16, 13, 13, 5, 2)
## for any n, k, i, j
## cell_grid[n, i, j, anchor, k] = j when k = 0
## for any n, k, i, j
## cell_grid[n, i, j, anchor, k] = i when k = 1
cell_grid = tf.tile(tf.concat([cell_x,cell_y], -1), [BATCH_SIZE, 1, 1, BOX, 1])
return(cell_grid)
def adjust_scale_prediction(y_pred, cell_grid, ANCHORS):
"""
Adjust prediction
== input ==
y_pred : takes any real values
tensor of shape = (N batch, NGrid h, NGrid w, NAnchor, 4 + 1 + N class)
ANCHORS : list containing width and height specializaiton of anchor box
== output ==
pred_box_xy : shape = (N batch, N grid x, N grid y, N anchor, 2), contianing [center_y, center_x] rangining [0,0]x[grid_H-1,grid_W-1]
pred_box_xy[irow,igrid_h,igrid_w,ianchor,0] = center_x
pred_box_xy[irow,igrid_h,igrid_w,ianchor,1] = center_1
calculation process:
tf.sigmoid(y_pred[...,:2]) : takes values between 0 and 1
tf.sigmoid(y_pred[...,:2]) + cell_grid : takes values between 0 and grid_W - 1 for x coordinate
takes values between 0 and grid_H - 1 for y coordinate
pred_Box_wh : shape = (N batch, N grid h, N grid w, N anchor, 2), containing width and height, rangining [0,0]x[grid_H-1,grid_W-1]
pred_box_conf : shape = (N batch, N grid h, N grid w, N anchor, 1), containing confidence to range between 0 and 1
pred_box_class : shape = (N batch, N grid h, N grid w, N anchor, N class), containing
"""
BOX = int(len(ANCHORS)/2)
## cell_grid is of the shape of
### adjust x and y
# the bounding box bx and by are rescaled to range between 0 and 1 for given gird.
# Since there are BOX x BOX grids, we rescale each bx and by to range between 0 to BOX + 1
pred_box_xy = tf.sigmoid(y_pred[..., :2]) + cell_grid # bx, by
### adjust w and h
# exp to make width and height positive
# rescale each grid to make some anchor "good" at representing certain shape of bounding box
pred_box_wh = tf.exp(y_pred[..., 2:4]) * np.reshape(ANCHORS,[1,1,1,BOX,2]) # bw, bh
### adjust confidence
pred_box_conf = tf.sigmoid(y_pred[..., 4])# prob bb
### adjust class probabilities
pred_box_class = y_pred[..., 5:] # prC1, prC2, ..., prC20
return(pred_box_xy,pred_box_wh,pred_box_conf,pred_box_class)
Experiment adjust_scale_prediction¶
I generate the real valued y_pred before rescaling from Normal(mean=0,sd = const/(GRID_H*GRID_W)), as this will be my weight initializer for the layer 23 when const = 1. I will set const = 10 to make the distribution variance a bit larger.
The bounding box parameters x, y, w, h and confidence are in the expected range.
However, the class probabilities can take negative values. This is ok because the loss function later applies softmax to y_pred[:,:,:,:,5:].
def print_min_max(vec,title):
print("{} MIN={:5.2f}, MAX={:5.2f}".format(
title,np.min(vec),np.max(vec)))
print("*"*30)
print("prepare inputs")
GRID_W = 13
GRID_H = 13
BOX = int(len(ANCHORS)/2)
CLASS = len(LABELS)
size = BATCH_SIZE*GRID_W*GRID_H*BOX*(4 + 1 + CLASS)
y_pred = np.random.normal(size=size,scale = 10/(GRID_H*GRID_W))
y_pred = y_pred.reshape(BATCH_SIZE,GRID_H,GRID_W,BOX,4 + 1 + CLASS)
print("y_pred before scaling = {}".format(y_pred.shape))
print("*"*30)
print("define tensor graph")
y_pred_tf = tf.constant(y_pred,dtype="float32")
cell_grid = get_cell_grid(GRID_W,GRID_H,BATCH_SIZE,BOX)
(pred_box_xy_tf, pred_box_wh_tf,
pred_box_conf_tf, pred_box_class_tf) = adjust_scale_prediction(y_pred_tf,
cell_grid,
ANCHORS)
print("*"*30 + "\nouput\n" + "*"*30)
with tf.Session() as sess:
(pred_box_xy, pred_box_wh,
pred_box_conf, pred_box_class) = sess.run(
[pred_box_xy_tf, pred_box_wh_tf,
pred_box_conf_tf, pred_box_class_tf])
print("\npred_box_xy {}".format(pred_box_xy.shape))
for igrid_w in range(pred_box_xy.shape[2]):
print_min_max(pred_box_xy[:,:,igrid_w,:,0].flatten(),
" bounding box x at iGRID_W={:02.0f}".format(igrid_w))
for igrid_h in range(pred_box_xy.shape[1]):
print_min_max(pred_box_xy[:,igrid_h,:,:,1].flatten(),
" bounding box y at iGRID_H={:02.0f}".format(igrid_h))
print("\npred_box_wh {}".format(pred_box_wh.shape))
print_min_max(pred_box_wh[:,:,:,:,0].flatten()," bounding box width ")
print_min_max(pred_box_wh[:,:,:,:,1].flatten()," bounding box height")
print("\npred_box_conf {}".format(pred_box_conf.shape))
print_min_max(pred_box_conf.flatten()," confidence ")
print("\npred_box_class {}".format(pred_box_class.shape))
print_min_max(pred_box_class.flatten()," class probability")
Step 2: Extract ground truth output¶
Extraction of the ground truth output is simpler than the extraction of the prediction output because the ground truth is already encoded in the correct scales.
def extract_ground_truth(y_true):
true_box_xy = y_true[..., 0:2] # bounding box x, y coordinate in grid cell scale
true_box_wh = y_true[..., 2:4] # number of cells accross, horizontally and vertically
true_box_conf = y_true[...,4] # confidence
true_box_class = tf.argmax(y_true[..., 5:], -1)
return(true_box_xy, true_box_wh, true_box_conf, true_box_class)
Experiment extract_ground_truth¶
The scales of the $C_{i,j}$ and ${p^c}_{i,j}$ are different from $\widehat{C}_{i,j}$ and $\widehat{p^c}_{i,j}$, as the their ground truths take 0/1 values:
| Estimate | Ground truth | |
|---|---|---|
| $C_{i,j}$ | between 0 and 1 | 1 (=an object exists) or 0 |
| $p^c_{i,j}$ | between 0 and 1 | 1 (=$c$th class object exists) or 0 |
| later transfered to class index $c$ |
When $C_{i,j}=1$, the scales of $x_{i,j}$, $y_{i,j}$, $w_{i,j}$, $h_{i,j}$ are the same as $\hat{x}_{i,j}$, $\hat{y}_{i,j}$, $\hat{w}_{i,j}$, $\hat{h}_{i,j}$. When $C_{i,j}=0$, then all bounding box parameters $x_{i,j}$, $y_{i,j}$, $w_{i,j}$, $h_{i,j}$ takes zero values as no object exists for the (grid_cell, anchor) pair.
# y_batch is the output of the simpleBatchGenerator.fit()
print("Input y_batch = {}".format(y_batch.shape))
y_batch_tf = tf.constant(y_batch,dtype="float32")
(true_box_xy_tf, true_box_wh_tf,
true_box_conf_tf, true_box_class_tf) = extract_ground_truth(y_batch_tf)
print("*"*30 + "\nouput\n" + "*"*30)
with tf.Session() as sess:
(true_box_xy, true_box_wh,
true_box_conf, true_box_class) = sess.run(
[true_box_xy_tf, true_box_wh_tf,
true_box_conf_tf, true_box_class_tf])
print("\ntrue_box_xy {}".format(true_box_xy.shape))
for igrid_w in range(true_box_xy.shape[2]):
vec = true_box_xy[:,:,igrid_w,:,0].flatten()
pick = true_box_conf[:,:,igrid_w,:].flatten() == 1 ## only pick C_ij = 1
print_min_max(vec[pick]," bounding box x at iGRID_W={:02.0f}".format(igrid_w))
for igrid_h in range(true_box_xy.shape[1]):
vec = true_box_xy[:,igrid_h,:,:,1].flatten()
pick = true_box_conf[:,igrid_h,:,:].flatten() == 1 ## only pick C_ij = 1
print_min_max(vec[pick]," bounding box y at iGRID_H={:02.0f}".format(igrid_h))
print("\ntrue_box_wh {}".format(true_box_wh.shape))
print_min_max(true_box_wh[:,:,:,:,0].flatten()," bounding box width ")
print_min_max(true_box_wh[:,:,:,:,1].flatten()," bounding box height")
print("\ntrue_box_conf {}".format(true_box_conf.shape))
print(" confidence, unique value = {}".format(np.unique(true_box_conf.flatten())))
print("\ntrue_box_class {}".format(true_box_class.shape))
print(" class index, unique value = {}".format(np.unique(true_box_class.flatten())) )
Step 3: calculate $\text{loss}_{i,j}^{xywh}$¶
Now we are ready to calculate the loss specific to the bounding box parameters.
\begin{array}{rl} \textrm{loss}_{i,j}^{xywh}&= \frac{1}{N_{L^{obj}}} \lambda_{\textrm{coord}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \big[ \left(x_{i,j}-\hat{x}_{i,j}\right)^2 + \left(y_{i,j}-\hat{y}_{i,j}\right)^2 +\\ &\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\left(\sqrt{w}_{i,j}-\sqrt{\hat{w}}_{i,j}\right)^2 + \left(\sqrt{h}_{i,j}-\sqrt{\hat{h}}_{i,j}\right)^2 \big] \end{array}
def calc_loss_xywh(true_box_conf,
COORD_SCALE,
true_box_xy, pred_box_xy,true_box_wh,pred_box_wh):
'''
coord_mask: np.array of shape (Nbatch, Ngrid h, N grid w, N anchor, 1)
lambda_{coord} L_{i,j}^{obj}
'''
# lambda_{coord} L_{i,j}^{obj}
# np.array of shape (Nbatch, Ngrid h, N grid w, N anchor, 1)
coord_mask = tf.expand_dims(true_box_conf, axis=-1) * COORD_SCALE
nb_coord_box = tf.reduce_sum(tf.to_float(coord_mask > 0.0))
loss_xy = tf.reduce_sum(tf.square(true_box_xy-pred_box_xy) * coord_mask) / (nb_coord_box + 1e-6) / 2.
loss_wh = tf.reduce_sum(tf.square(true_box_wh-pred_box_wh) * coord_mask) / (nb_coord_box + 1e-6) / 2.
return(loss_xy + loss_wh, coord_mask)
Experiment calc_loss_xywh¶
LAMBDA_COORD = 1
loss_xywh_tf, coord_mask_tf = calc_loss_xywh(true_box_conf_tf,LAMBDA_COORD,
true_box_xy_tf, pred_box_xy_tf,true_box_wh_tf,pred_box_wh_tf)
print("*"*30 + "\nouput\n" + "*"*30)
with tf.Session() as sess:
loss_xywh = sess.run([loss_xywh_tf])[0]
print("loss_xywh = {:4.3f}".format(loss_xywh))
Step 4: calculate $\text{loss}_{i,j}^{p}$¶
$$ \textrm{loss}_{i,j}^p=-\frac{1}{N_{L^{obj}}} \lambda_{\text{class}}\sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \sum_{c \in \text{class}} p_{i,j}^c \text{log}(\hat{p}_{i,j}^c) $$
def calc_loss_class(true_box_conf,CLASS_SCALE, true_box_class,pred_box_class):
'''
== input ==
true_box_conf : tensor of shape (N batch, N grid h, N grid w, N anchor)
true_box_class : tensor of shape (N batch, N grid h, N grid w, N anchor), containing class index
pred_box_class : tensor of shape (N batch, N grid h, N grid w, N anchor, N class)
CLASS_SCALE : 1.0
== output ==
class_mask
if object exists in this (grid_cell, anchor) pair and the class object receive nonzero weight
class_mask[iframe,igridy,igridx,ianchor] = 1
else:
0
'''
class_mask = true_box_conf * CLASS_SCALE ## L_{i,j}^obj * lambda_class
nb_class_box = tf.reduce_sum(tf.to_float(class_mask > 0.0))
loss_class = tf.nn.sparse_softmax_cross_entropy_with_logits(labels = true_box_class,
logits = pred_box_class)
loss_class = tf.reduce_sum(loss_class * class_mask) / (nb_class_box + 1e-6)
return(loss_class)
#Example useage of tf.gather
#indices = np.array([[0,0],
# [1,0],
# [0,1]])
#arr = tf.constant(indices)
#temp = tf.gather(np.array([100,-20]), arr)
#with tf.Session() as sess:
# t = sess.run(temp)
#print(t)
#[[100 100]
# [-20 100]
# [100 -20]]
Experiment calc_loss_class¶
LAMBDA_CLASS = 1
loss_class_tf = calc_loss_class(true_box_conf_tf,LAMBDA_CLASS,
true_box_class_tf,pred_box_class_tf)
print("*"*30 + "\nouput\n" + "*"*30)
with tf.Session() as sess:
loss_class = sess.run(loss_class_tf)
print("loss_class = {:4.3f}".format(loss_class))
$\textrm{loss}_{i,j}^c$¶
The rest of calculation is dedicated to evaluate confidence loss $\textrm{loss}_{i,j}^c$
$$ \textrm{loss}_{i,j}^c =\lambda_{\text{obj}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \left( IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i,j}} - \widehat{C}_{i,j} \right)^2+ \lambda_{\textrm{noobj}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{noobj}} \left(0 - \widehat{C}_{i,j}\right) $$
Step 5, calculate $IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i,j}} $¶
For each (grid cell, anchor) pair, compute IOU between ground truth bounding box and predicted bounding box. $IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i,j}} $ is 0 if $C_{i,j}=0$.
def get_intersect_area(true_xy,true_wh,
pred_xy,pred_wh):
'''
== INPUT ==
true_xy,pred_xy, true_wh and pred_wh must have the same shape length
p1 : pred_mins = (px1,py1)
p2 : pred_maxs = (px2,py2)
t1 : true_mins = (tx1,ty1)
t2 : true_maxs = (tx2,ty2)
p1______________________
| t1___________ |
| | | |
|_______|___________|__|p2
| |rmax
|___________|
t2
intersect_mins : rmin = t1 = (tx1,ty1)
intersect_maxs : rmax = (rmaxx,rmaxy)
intersect_wh : (rmaxx - tx1, rmaxy - ty1)
'''
true_wh_half = true_wh / 2.
true_mins = true_xy - true_wh_half
true_maxes = true_xy + true_wh_half
pred_wh_half = pred_wh / 2.
pred_mins = pred_xy - pred_wh_half
pred_maxes = pred_xy + pred_wh_half
intersect_mins = tf.maximum(pred_mins, true_mins)
intersect_maxes = tf.minimum(pred_maxes, true_maxes)
intersect_wh = tf.maximum(intersect_maxes - intersect_mins, 0.)
intersect_areas = intersect_wh[..., 0] * intersect_wh[..., 1]
true_areas = true_wh[..., 0] * true_wh[..., 1]
pred_areas = pred_wh[..., 0] * pred_wh[..., 1]
union_areas = pred_areas + true_areas - intersect_areas
iou_scores = tf.truediv(intersect_areas, union_areas)
return(iou_scores)
def calc_IOU_pred_true_assigned(true_box_conf,
true_box_xy, true_box_wh,
pred_box_xy, pred_box_wh):
'''
== input ==
true_box_conf : tensor of shape (N batch, N grid h, N grid w, N anchor )
true_box_xy : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
true_box_wh : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
pred_box_xy : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
pred_box_wh : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
== output ==
true_box_conf : tensor of shape (N batch, N grid h, N grid w, N anchor)
true_box_conf value depends on the predicted values
true_box_conf = IOU_{true,pred} if objecte exist in this anchor else 0
'''
iou_scores = get_intersect_area(true_box_xy,true_box_wh,
pred_box_xy,pred_box_wh)
true_box_conf_IOU = iou_scores * true_box_conf
return(true_box_conf_IOU)
Experiment calc_IOU_pred_true_assigned¶
true_box_conf_IOU_tf = calc_IOU_pred_true_assigned(
true_box_conf_tf,
true_box_xy_tf, true_box_wh_tf,
pred_box_xy_tf, pred_box_wh_tf)
with tf.Session() as sess:
true_box_conf_IOU = sess.run(true_box_conf_IOU_tf)
print("*"*30 + "\ninput\n" + "*"*30)
print("true_box_conf_tf = {}".format(true_box_conf_tf))
print("true_box_xy_tf = {}".format(true_box_xy_tf))
print("true_box_wh_tf = {}".format(true_box_wh_tf))
print("pred_box_xy_tf = {}".format(pred_box_xy_tf))
print("pred_box_wh_tf = {}".format(pred_box_wh_tf))
print("*"*30 + "\nouput\n" + "*"*30)
print("true_box_conf_IOU.shape = {}".format(true_box_conf_IOU.shape))
vec = true_box_conf_IOU.flatten()
pick = vec!=0
vec = vec[pick]
plt.hist(vec)
plt.title("Histogram\nN (%) nonzero true_box_conf_IOU = {} ({:5.2f}%)".format(np.sum(pick),
100*np.mean(pick)))
plt.xlabel("nonzero true_box_conf_IOU")
plt.show()

Step 6: Calculate $\text{max}_{i',j'}¶
\;\;IOU{\text{preduiction}{i,j}}^{\text{ground truth}_{i',j'}}$
For each predicted bounded box from (grid cell, anchor box), calculate the best IOU, regardless of the ground truth anchor box that each object gets assigned.
This calculation uses true_boxes tensor.
This tensor corresponds to the input b_batch from SimpleBatchGenerator, which is already introduced in Part 2.
From the previous blog, I cite the b_batch description.
b_batch
The numpy array of shape (BATCH_SIZE, 1, 1, 1, TRUE_BOX_BUFFER, 4).
b_batch[iframe,1,1,1,ibuffer,:]containsibufferth object's(center_x,center_y,center_w,center_h)iniframeth frame.If
ibuffer> N objects iniframeth frame, then the values are simply 0.TRUE_BOX_BUFFERhas to be some large number, so that the frame with the biggest number of objects can also record all objects.The order of the objects do not matter.
def calc_IOU_pred_true_best(pred_box_xy,pred_box_wh,true_boxes):
'''
== input ==
pred_box_xy : tensor of shape (N batch, N grid h, N grid w, N anchor, 2)
pred_box_wh : tensor of shape (N batch, N grid h, N grid w, N anchor, 2)
true_boxes : tensor of shape (N batch, N grid h, N grid w, N anchor, 2)
== output ==
best_ious
for each iframe,
best_ious[iframe,igridy,igridx,ianchor] contains
the IOU of the object that is most likely included (or best fitted)
within the bounded box recorded in (grid_cell, anchor) pair
NOTE: a same object may be contained in multiple (grid_cell, anchor) pair
from best_ious, you cannot tell how may actual objects are captured as the "best" object
'''
true_xy = true_boxes[..., 0:2] # (N batch, 1, 1, 1, TRUE_BOX_BUFFER, 2)
true_wh = true_boxes[..., 2:4] # (N batch, 1, 1, 1, TRUE_BOX_BUFFER, 2)
pred_xy = tf.expand_dims(pred_box_xy, 4) # (N batch, N grid_h, N grid_w, N anchor, 1, 2)
pred_wh = tf.expand_dims(pred_box_wh, 4) # (N batch, N grid_h, N grid_w, N anchor, 1, 2)
iou_scores = get_intersect_area(true_xy,
true_wh,
pred_xy,
pred_wh) # (N batch, N grid_h, N grid_w, N anchor, 50)
best_ious = tf.reduce_max(iou_scores, axis=4) # (N batch, N grid_h, N grid_w, N anchor)
return(best_ious)
Experiment calc_IOU_pred_true_best¶
true_boxes_tf = tf.constant(b_batch,dtype="float32")
best_ious_tf = calc_IOU_pred_true_best(pred_box_xy_tf,
pred_box_wh_tf,
true_boxes_tf)
with tf.Session() as sess:
best_ious = sess.run(best_ious_tf)
print("*"*30 + "\ninput\n" + "*"*30)
print("true_box_wh_tf = {}".format(true_box_wh_tf))
print("pred_box_xy_tf = {}".format(pred_box_xy_tf))
print("pred_box_wh_tf = {}".format(pred_box_wh_tf))
print("*"*30 + "\nouput\n" + "*"*30)
print("best_ious.shape = {}".format(best_ious.shape))
vec = best_ious.flatten()
pick = vec!=0
vec = vec[pick]
plt.hist(vec)
plt.title("Histogram\nN (%) nonzero best_ious = {} ({:5.2f}%)".format(np.sum(pick),
100*np.mean(pick)))
plt.xlabel("nonzero best_ious")
plt.show()

Step 7: Calculate $\lambda_{\text{noobj}}L_{i,j}^{\text{noobj}}$ and $\lambda_{\text{obj}}L_{i,j}^{\text{obj}}$¶
For each grid cell, calculate no object mask. $$ \begin{array}{rl} L_{i,j}^{\text{noobj}} & = \begin{cases} 1 \;\;\text{if}\;\;\text{max}_{i',j'} \;\;IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i',j'}} < 0.6 \;\text{and}\; C_{i,j} = 0\\ 0\;\;\text{else}\\ \end{cases} \end{array} $$
def get_conf_mask(best_ious, true_box_conf, true_box_conf_IOU,LAMBDA_NO_OBJECT, LAMBDA_OBJECT):
'''
== input ==
best_ious : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
true_box_conf : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
true_box_conf_IOU : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
LAMBDA_NO_OBJECT : 1.0
LAMBDA_OBJECT : 5.0
== output ==
conf_mask : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
conf_mask[iframe, igridy, igridx, ianchor] = 0
when there is no object assigned in (grid cell, anchor) pair and the region seems useless i.e.
y_true[iframe,igridx,igridy,4] = 0 "and" the predicted region has no object that has IoU > 0.6
conf_mask[iframe, igridy, igridx, ianchor] = NO_OBJECT_SCALE
when there is no object assigned in (grid cell, anchor) pair but region seems to include some object
y_true[iframe,igridx,igridy,4] = 0 "and" the predicted region has some object that has IoU > 0.6
conf_mask[iframe, igridy, igridx, ianchor] = OBJECT_SCALE
when there is an object in (grid cell, anchor) pair
'''
conf_mask = tf.to_float(best_ious < 0.6) * (1 - true_box_conf) * LAMBDA_NO_OBJECT
# penalize the confidence of the boxes, which are reponsible for corresponding ground truth box
conf_mask = conf_mask + true_box_conf_IOU * LAMBDA_OBJECT
return(conf_mask)
Experiment get_conf_mask¶
conf_mask_tf = get_conf_mask(best_ious_tf,
true_box_conf_tf,
true_box_conf_IOU_tf,
LAMBDA_NO_OBJECT,
LAMBDA_OBJECT)
print("*"*30 + "\ninput\n" + "*"*30)
print("best_ious = {}".format(best_ious_tf))
print("true_box_conf = {}".format(true_box_conf_tf))
print("true_box_conf_IOU = {}".format(true_box_conf_IOU_tf))
print("LAMBDA_NO_OBJECT = {}".format(LAMBDA_NO_OBJECT))
print("LAMBDA_OBJECT = {}".format(LAMBDA_OBJECT))
with tf.Session() as sess:
conf_mask = sess.run(conf_mask_tf)
print("*"*30 + "\noutput\n" + "*"*30)
print("conf_mask shape = {}".format(conf_mask.shape))
Step 8: Calculate loss for the confidence $\textrm{loss}_{i,j}^c$¶
$$ \textrm{loss}_{i,j}^c = \frac{1}{N^{conf}}\left[ \lambda_{\text{obj}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} \left( IOU_{\text{preduiction}_{i,j}}^{\text{ground truth}_{i,j}} - \widehat{C}_{i,j} \right)^2+ \lambda_{\textrm{noobj}} \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{noobj}} \left(0 - \widehat{C}_{i,j}\right) \right] $$
- $N^{conf} = \sum_{i=0}^{S^2} \sum_{j=0}^B L_{i,j}^{\text{obj}} + L_{i,j}^{\text{noobj}}(1-L_{i,j}^{\text{obj}})$
def calc_loss_conf(conf_mask,true_box_conf_IOU, pred_box_conf):
'''
== input ==
conf_mask : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
true_box_conf_IOU : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
pred_box_conf : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
'''
# the number of (grid cell, anchor) pair that has an assigned object or
# that has no assigned object but some objects may be in bounding box.
# N conf
nb_conf_box = tf.reduce_sum(tf.to_float(conf_mask > 0.0))
loss_conf = tf.reduce_sum(tf.square(true_box_conf_IOU-pred_box_conf) * conf_mask) / (nb_conf_box + 1e-6) / 2.
return(loss_conf)
Experiment calc_loss_conf¶
print("*"*30 + "\ninput\n" + "*"*30)
print("conf_mask_tf = {}".format(conf_mask_tf))
print("true_box_conf_IOU_tf = {}".format(true_box_conf_IOU_tf))
print("pred_box_conf_tf = {}".format(pred_box_conf_tf))
loss_conf_tf = calc_loss_conf(conf_mask_tf,true_box_conf_IOU_tf, pred_box_conf_tf)
with tf.Session() as sess:
loss_conf = sess.run(loss_conf_tf)
print("*"*30 + "\noutput\n" + "*"*30)
print("loss_conf = {:5.4f}".format(loss_conf))
custom_loss(y_true,y_pred)¶
Finally combine all the calculation above into custom_loss(y_true,y_pred)
Notice that true_boxes are tensor defined when the Keras model is declared.
However, this tensor will not be passed as explicit arguments of the loss function.
def custom_loss(y_true, y_pred):
'''
y_true : (N batch, N grid h, N grid w, N anchor, 4 + 1 + N classes)
y_true[irow, i_gridh, i_gridw, i_anchor, :4] = center_x, center_y, w, h
center_x : The x coordinate center of the bounding box.
Rescaled to range between 0 and N gird w (e.g., ranging between [0,13)
center_y : The y coordinate center of the bounding box.
Rescaled to range between 0 and N gird h (e.g., ranging between [0,13)
w : The width of the bounding box.
Rescaled to range between 0 and N gird w (e.g., ranging between [0,13)
h : The height of the bounding box.
Rescaled to range between 0 and N gird h (e.g., ranging between [0,13)
y_true[irow, i_gridh, i_gridw, i_anchor, 4] = ground truth confidence
ground truth confidence is 1 if object exists in this (anchor box, gird cell) pair
y_true[irow, i_gridh, i_gridw, i_anchor, 5 + iclass] = 1 if the object is in category else 0
'''
total_recall = tf.Variable(0.)
# Step 1: Adjust prediction output
cell_grid = get_cell_grid(GRID_W,GRID_H,BATCH_SIZE,BOX)
pred_box_xy, pred_box_wh, pred_box_conf, pred_box_class = adjust_scale_prediction(y_pred,cell_grid,ANCHORS)
# Step 2: Extract ground truth output
true_box_xy, true_box_wh, true_box_conf, true_box_class = extract_ground_truth(y_true)
# Step 3: Calculate loss for the bounding box parameters
loss_xywh, coord_mask = calc_loss_xywh(true_box_conf,LAMBDA_COORD,
true_box_xy, pred_box_xy,true_box_wh,pred_box_wh)
# Step 4: Calculate loss for the class probabilities
loss_class = calc_loss_class(true_box_conf,LAMBDA_CLASS,
true_box_class,pred_box_class)
# Step 5: For each (grid cell, anchor) pair,
# calculate the IoU between predicted and ground truth bounding box
true_box_conf_IOU = calc_IOU_pred_true_assigned(true_box_conf,
true_box_xy, true_box_wh,
pred_box_xy, pred_box_wh)
# Step 6: For each predicted bounded box from (grid cell, anchor box),
# calculate the best IOU, regardless of the ground truth anchor box that each object gets assigned.
best_ious = calc_IOU_pred_true_best(pred_box_xy,pred_box_wh,true_boxes)
# Step 7: For each grid cell, calculate the L_{i,j}^{noobj}
conf_mask = get_conf_mask(best_ious, true_box_conf, true_box_conf_IOU,LAMBDA_NO_OBJECT, LAMBDA_OBJECT)
# Step 8: Calculate loss for the confidence
loss_conf = calc_loss_conf(conf_mask,true_box_conf_IOU, pred_box_conf)
loss = loss_xywh + loss_conf + loss_class
return loss
Experiment custom_loss¶
true_boxes = tf.Variable(np.zeros_like(b_batch),dtype="float32")
loss_tf = custom_loss(y_batch_tf, y_pred_tf)
with tf.Session() as sess:
loss = sess.run(loss_tf,
feed_dict = {true_boxes: b_batch})
loss
FairyOnIce/ObjectDetectionYolo contains this ipython notebook and all the functions that I defined in this notebook.